序論
1915年,福特汽車推出T型號汽車,加裝電燈與電喇叭,此後汽車日益仰賴電力與電動系統。起初各項功能均為獨立運作,例如控制車頭燈的開關也直接與電池相連;但今日各項系統均彼此相連,只要點亮車頭燈,儀表板照明、後視鏡及其他系統也可能隨之調整。不過若要發揮這些效果,各系統必須彼此溝通,隨著汽車演進,內部網路也因而成形,未來在自動駕駛系統開發過程裡,車輛內部與車輛之間的資料傳輸需求也勢必增加。本文檢視三種車用通訊標準,控制器區域網路、乙太網路、平面顯示器連結,並探索系統和介面如何搭配較適合。
1915年,福特汽車推出T型號汽車,加裝電燈與電喇叭,此後汽車日益仰賴電力與電動系統。起初各項功能均為獨立運作,例如控制車頭燈的開關也直接與電池相連;但今日各項系統均彼此相連,只要點亮車頭燈,儀表板照明、後視鏡及其他系統也可能隨之調整。不過若要發揮這些效果,各系統必須彼此溝通,隨著汽車演進,內部網路也因而成形,未來在自動駕駛系統開發過程裡,車輛內部與車輛之間的資料傳輸需求也勢必增加。本文檢視三種車用通訊標準,控制器區域網路、乙太網路、平面顯示器連結,並探索系統和介面如何搭配較適合。
控制器區域網路
博世公司 (Robert Bosch GmbH) 於一九八零年代開發控制器區域網路 (CAN bus),今日獲多家晶片與次系統製造商支援,並普遍應用於所有現代汽車內。控制器區域網路讓匯流排中不同的控制器與處理器藉由通過匯流排的訊息彼此溝通,亦具備優先次序排列方法,確保重要訊息不受次要訊息干擾。CAN bus 運作速度低於1 Mbps,訊息長度 (CAN frames) 則通常為50至100位元。
博世公司 (Robert Bosch GmbH) 於一九八零年代開發控制器區域網路 (CAN bus),今日獲多家晶片與次系統製造商支援,並普遍應用於所有現代汽車內。控制器區域網路讓匯流排中不同的控制器與處理器藉由通過匯流排的訊息彼此溝通,亦具備優先次序排列方法,確保重要訊息不受次要訊息干擾。CAN bus 運作速度低於1 Mbps,訊息長度 (CAN frames) 則通常為50至100位元。
由於許多控制器能共用同一件 CAN bus,故通常不適合發送更新頻率超過每秒100次的訊息,比較適合從感測器傳送更新頻率較低的訊息至引擎控制單位。應用範例為機械系統通訊,例如傳輸、煞車、巡航控制、動力方向、車窗、門鎖等,因為資料量有限,頻寬需求也相對較低。
隨著車載系統日益複雜,網路內感測器與處理器日增,整體傳輸速度也因此降低,圖1顯示一件 CAN bus 用於車門與空調控制系統,由於兩者均為低頻寬應用,相互干擾的疑慮較低,但若同時再加上更高頻寬、更重要的功能 (如引擎控制),則必須調降車門及空調控制的重要性,才不至於干擾引擎控制。
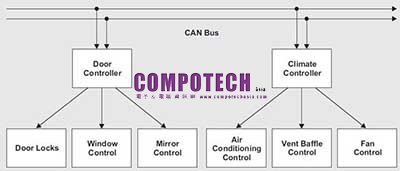
圖1:CAN-bus應用部分區塊
整體而言,CAN bus 適合車內機械感測器與系統之間的通訊網路,但不足以涵蓋需要較高頻寬的應用需求,如娛樂系統、攝影鏡頭或雷達的感測器等。
乙太網路
乙太網路是家庭與辦公室相當常見的高速介面,有些車輛也使用乙太網路傳輸各類高速資料。乙太網路與 CAN bus 同樣為封包式系統,資訊在網路內各節點之間以封包傳送;兩者均為雙向系統,個別連結速度則也同樣與系統內節點數量成反比,不過乙太網路的資料傳輸速度仍高於 CAN bus 百倍。
乙太網路是家庭與辦公室相當常見的高速介面,有些車輛也使用乙太網路傳輸各類高速資料。乙太網路與 CAN bus 同樣為封包式系統,資訊在網路內各節點之間以封包傳送;兩者均為雙向系統,個別連結速度則也同樣與系統內節點數量成反比,不過乙太網路的資料傳輸速度仍高於 CAN bus 百倍。
乙太網路適合應用裝置的中頻寬通訊,例如導航系統與控制,使用方式大致與 CAN bus相同,但提供更大頻寬。其理論上可取代 CAN bus,不過由於乙太網路每一節點成本較高,因此較常用於增強 CAN bus 傳輸能力。
目前有些車輛選用乙太網路處理資料密集需求,例如備用攝影機、娛樂系統等,其中又以德州儀器的 DP83848Q-Q1 格外適合車載應用,此種乙太網路 PHY 符合AEC-Q100 二級,並包括內部迴送測試模式,可診斷系統問題。
在乙太網路內傳送影像之前,即便只使用單一影像通道,也得先壓縮,抵達目的地後再解壓縮,以避免超過頻寬上限。故在備用攝影機等應用內,必須設置相對高功率的處理器,才可以將影像壓縮後送入乙太網路內,造成攝影機體積與價格增加,也需要更高的熱耗散能力。此種解決方案另一缺點在於,壓縮與解壓縮步驟會產生延遲。
若車內多部攝影機或其他影像來源共用同一乙太網路,就得在壓縮能力(也影響畫質)及通道數量之間取捨。如果在車內以階層式設置多項網路,則可改善此種現象,例如第一網路只處理引擎控制與診斷,第二網路負責後座娛樂及音響系統,第三網路支援駕駛視野輔助鏡頭等。總而言之,乙太網路性能優於 CAN bus,但系統更加複雜,且仍不易處理影像等最高頻寬需求應用。
平面顯示器連結
平面顯示器連結 (FPD-Link) 專為點到點高頻寬資料傳輸設計,高速前通道每秒可傳輸數 GB,後通道速度較慢,後通道能以 400 kbps 速率傳輸 I2C 匯流排,或以最高 1 Mbps 的速率控制 GPIO 線路。FPD-Link 是為車內影像資料傳輸開發,例如可傳送未壓縮影片至顯示器,同時透過後通道,將顯示器觸控螢幕的資訊送回產生影片的處理器。FPD-Link 的實體層為雙絞線或同軸電纜,線路均為專用,故若FPD-Link 用於備用攝影機,一條電線會連結備用攝影機與處理器,另一條線路連結處理器與車內顯示器。
平面顯示器連結 (FPD-Link) 專為點到點高頻寬資料傳輸設計,高速前通道每秒可傳輸數 GB,後通道速度較慢,後通道能以 400 kbps 速率傳輸 I2C 匯流排,或以最高 1 Mbps 的速率控制 GPIO 線路。FPD-Link 是為車內影像資料傳輸開發,例如可傳送未壓縮影片至顯示器,同時透過後通道,將顯示器觸控螢幕的資訊送回產生影片的處理器。FPD-Link 的實體層為雙絞線或同軸電纜,線路均為專用,故若FPD-Link 用於備用攝影機,一條電線會連結備用攝影機與處理器,另一條線路連結處理器與車內顯示器。
在此應用中,FPD-Link 的一大優點在於,因為不需壓縮與解壓縮,攝影機與顯示器的線路簡易許多,且因為是專用線路,影像系統畫質高低不會影響車內其他設備運作,後通道可用於攝影機配置、操作鏡頭縮放,或傳送觸控螢幕資訊回到控制器,但不會干擾前通道的影像傳輸。
對自動駕駛車輛而言,延遲多寡也是一大因素,壓縮與解壓縮需求會增加延遲。若為後座娛樂系統,DVD 資料讀取與螢幕顯示延遲不成太大問題,但若是攝影機在搜尋車輛路徑上的行人蹤影,影像延遲就可能造成致命後果。
FPD-Link 適合強調高頻寬、低延遲的連結應用,且因為具備後通道,以及使用單一雙絞線或同軸電纜供電,即可簡化線路需求。圖2為 OMAP 影像處理器以雙絞線連結至兩部攝影機及一部顯示器,雙絞線同時支援攝影機資料與觸控螢幕/攝影機設定資料,亦可為顯示器及攝影機供電。由於每條雙絞線均為各個週邊產品專用,兩部攝影機訊號即無干擾之虞。
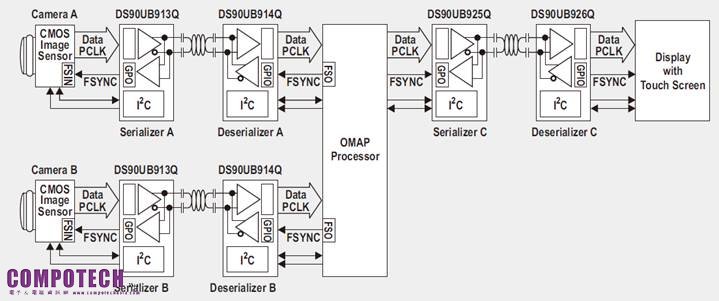
圖2:使用 FPD-Link 連結雙攝影機與顯示器
結論
其實三種介面均適合車載通訊,只是各自功能不同,CAN bus 最適合在意成本的低速控制應用;若頻寬需求提高,乙太網路則可做為加強介面,支援中度頻寬需求;若需要最高頻寬與最低延遲連結 (如自動駕駛車輛的後視攝影系統),則 FPD-Link 為不二選項。
其實三種介面均適合車載通訊,只是各自功能不同,CAN bus 最適合在意成本的低速控制應用;若頻寬需求提高,乙太網路則可做為加強介面,支援中度頻寬需求;若需要最高頻寬與最低延遲連結 (如自動駕駛車輛的後視攝影系統),則 FPD-Link 為不二選項。